Hoofdstuk 1
REM- EN STOPAFSTANDEN VAN DE VOERTUIGEN
Overzicht 1. Remspoorlengte en stopafstand van een courante
personenwagen in functie van zijn initiële snelheid. [Top]
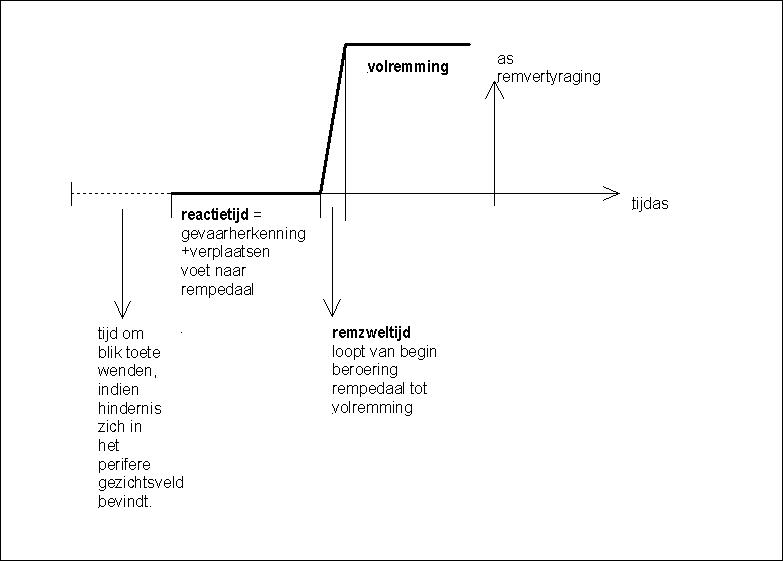
Reactietijd De reactietijd is de tijdsduur vanaf
het opmerken van de hindernis door de bestuurder tot het op volle druk komen
van zijn remmen (met eventueel remspoortekening). De reactietijd van de
doorsnee bestuurder met een doorsnee personenwagen ten aanzien van een
hindernis met uitgesproken reactieopwekking (bijvoorbeeld een kind dat plots
dwarst) wordt gebruikelijk op 1 à 1,2 seconde genomen. Die reactietijd is dan
samengesteld uit ongeveer 0,8 à 1 seconde fysische reactie van de bestuurder
(waarnemen hindernis - onderkennen van het gevaar - verplaatsen voet tot
begin indrukken rempedaal) en 0,2 seconde oplooptijd van de reminstallatie
tot volle druk. Die laatste 0,2 seconde is dus in feite een machinetijd,
karakteristiek voor de reminstallatie, t.t.z. voor het voertuig. De
oplooptijd tot volle druk van de reminstallatie van een vrachtwagen is
meestal wat hoger (wegens meestal persluchtremmen i.p.v. hydraulische remmen
en vooral ook wegens langere remleidingen) en de totale reactietijd voor de
vrachtwagenbestuurder kan daarmee gebruikelijk op ca. 1,3 seconde vastgelegd
worden.
De soms gehoorde opmerking dat men
niet van iedere bestuurder kan verwachten dat zijn reactietijd één seconde
bedraagt en dat men een bestuurder, wiens reactietijd bijvoorbeeld 1,5
seconde bedraagt, nog niets kan ten kwade duiden, is in die zin onterecht dat
die één seconde reactietijd in feite al slaat op een statistische
bovenwaarde. Inderdaad heeft niet iedereen eenzelfde reactietijd en heeft een
gereputeerde doelman snellere reflexen dan de doorsnee bestuurder. Maar met
betrekking tot die fysische reactietijd van de bestuurders gelden blijkens
wetenschappelijke studies in werkelijkheid volgende statistische
cijfers : - een reactietijd van 0,4sec wordt
bereikt door 2% van de bestuurders; - een reactietijd van 0,69sec wordt
bereikt door 50 % van de bestuurders; - een reactietijd van 0,83sec wordt
bereikt door 98% van de bestuurders. Wanneer men dus in berekeningen een
reactietijd van 0,83 seconden vooropstelt, dan slaat dat dus op bijna 100%
van de bestuurders. (Uiteraard spreekt men dan van niet-geïntoxiceerde
bestuurders) Wanneer een hindernis opduikt niet in
het normale gezichtsveld van de bestuurder maar opzij in het perifere
gezichtsveld, dan moet die bestuurder de blik toewenden en dan verlengt
de reactietijd. Die bijkomende tijd om de blik toe te wenden bedraagt
met dezelfde statistische opdeling als hierboven: 0,32s (2%), 0,48s (50%),
0,55s (98%). (bovenstaande cijfers uit het werk van dr. H. Burg) Opmerking:
"de reactietijd bij duisternis" De soms gehoorde stelling
dat 's nachts de reactietijd langer wordt is in principe niet direct
juist. 'S nachts is het weliswaar moeilijker
de hindernis te onderscheiden maar, éénmaal men ze opmerkt, is de reactietijd
dezelfde als overdag. Uiteraard kan men een hindernis 's nachts minder goed
opmerken dan overdag maar het probleem van waar af men die hindernis bij
duisternis kan onderscheiden is een heel ander probleem dat nl. te maken
heeft met het contrasteren van die hindernis t.o.v. de achtergrond. Bijvoorbeeld in het Duitse
vaktijdschrift 'Verkehrsunfall und
Fahrzeugtechnik' van oktober 1993 en van
februari 1994 staat een interessant artikel in dat verband opgenomen van
Henry Rönitzsch van de TU Dresden. In dit onderzoek
werd de invloed van het contrast van een van opzij inkomend testbeeld op een
scherm nagegaan bij lage omgevingsluminantie ( 0,01
cd/m²) op de reactietijd (tot aan beroeren pedaal echter met voet al op
pedaal) van een aantal proefpersonen (11 personen). Men vond met daling van
het kontrast een toename van de reactietijd
van maximaal 0,2 seconden. Alle proefpersonen vertoonden toen reactietijden
tussen 0,73 en 0,9s. Wanneer men daar nog de omsteltijd (voet van
gaspedaal naar rempedaal) en de remzweltijd (indrukken rempedaal tot maximale
remvertraging) bijtelt kwam men dus in geval van zulke lage omgevingsluminantie (0,01 cd/m²) en slecht kontrast aan reactietijden van 1,1 à 1,3s (tot
volremming). In hoeverre een object,
bijvoorbeeld een voetganger, bij duisternis al dan niet voldoende kontrasteert om zichtbaar te zijn van op een bepaalde
afstand, maakt normalerwijs het voorwerp uit van een apart
onderzoek. Er kan in dat verband bijvoorbeeld verwezen worden
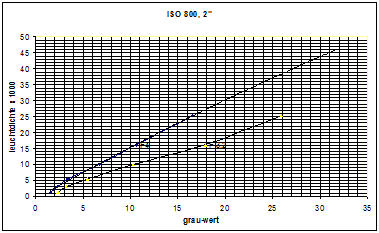
naar de techniek van dr. Cararo van de TU Dresden : Een object, bijvoorbeeld een donker geklede voetganger, is in de duisternis waarneembaar wanneer zijn contouren voldoende contrasteren t.o.v. zijn achtergrond of omgeving. Om die reden onderzoekt men in de werkwijze van dr. Carraro de luminantie (in candela/m²) van verschillende koppels testpunten bij de contouren van het te onderscheiden object, nl. telkens één punt op het object en één in de achtergrond er juist naast.
Die luminantiemeting kan gebeuren met een digitale camera op voorwaarde dat men die ijkt met behulp van een grijswaardentafel, die men mee fotografeert. Van die grijswaardentafel is per tafel de reflectiecoëfficiënt bekend (wordt meegegeven door dr. Carraro bij aankoop van de tafel). Wanneer men dan met een luxmeter de belichtingssterkte (in lux) meet, die invalt op de tafels, dan kan men per grijswaardentafel de luminantie van elke tafel berekenen. Wanneer men dan de digitale foto invoert in een fotobewerkingsprogramma, zoals Adobe Photoshop of Corel Photopaint, waarin men de grijswaarde (zwarting) van pixels of groepjes pixels in de foto kan uitlezen, dan kan men vooreerst een ijkcurve maken die de relatie aangeeft tussen enerzijds de ‘zwarting’ op de foto, genomen met een bepaalde camera-instelling, en anderzijds de luminantie, die hoort bij die graad van ‘zwarting’. Hiernaast een voorbeeld voor de camera Fuji Finepix 5000. Per voornoemd koppel testpunten wordt dan getoetst met de formule van Adrian, die opgeeft welke het luminantieverschil moet zijn opdat ter plaatse van die meetpunten er voldoende kontrast zou heersen voor een objectieve waarneembaarheid. Die formule wordt hier niet meer gegeven omdat dat te ver zou leiden. Het is hier niet de bedoeling een cursus lichttechniek te geven, enkel duidelijk te maken wat er kan en moet gedaan worden bij dergelijk onderzoek. Belangrijk is dat er sprake is van een ‘objectieve’ waarneembaarheid, die dus bijvoorbeeld rekening houdt met het feit dat de waarnemer beweegt en er zich in de realiteit ook niet aan verwacht dat daar in de duisternis op de rijbaan een onverlichte of slecht waarneembare hindernis aanwezig is. Men komt tot die objectieve waarneembaarheid door eerst de ‘waarneembaarheid in labo-omstandigheden’ te bepalen en dan aan de hand van testen in de praktijk en met proefpersonen na te gaan met welke factor men het ‘nodige luminantieverschil’ moet vermenigvuldigen om te kunnen spreken van een objectieve waarneembaarheid. Die factor bedraagt ongeveer 10.
De
stopafstand De stopafstand is
de remafstand plus de afstand doorlopen gedurende de reactietijd. Het is dus
de totale afstand, die men nodig heeft om bij het opmerken van een
hindernis of gevaarssituatie tot stilstand te
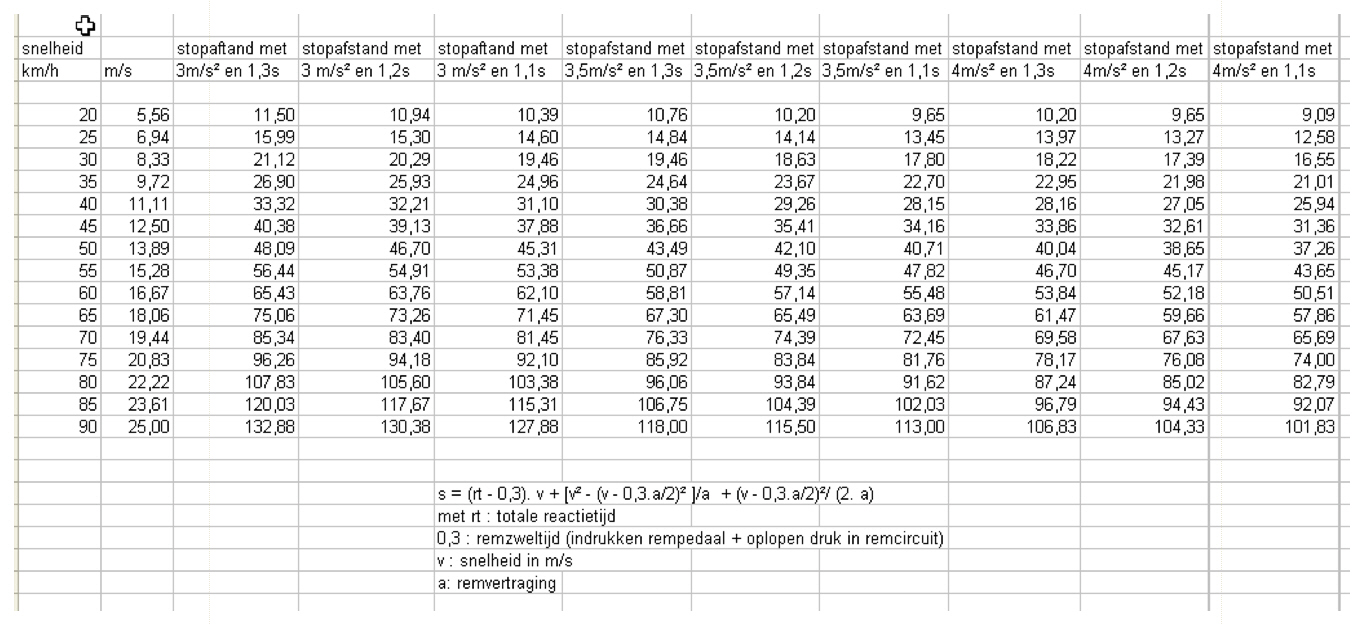
komen. Bij noodremming op droog wegdek
(rekenend met 7,5 m/s² remvertraging) krijgt men dan voor personenwagens
volgende remafstanden (remspoorlengtes) en volgende stopafstanden in functie
van de aanvankelijke snelheid van de personenwagen : TABEL
1
Hint. Om
snelheden om te rekenen van m/s naar km/u dient men ze te vermenigvuldigen
met 3,6. Om ze om te rekenen van km/u naar m/s dient men te delen
door 3,6. Op nat wegdek worden de rem- en
stopafstanden groter, te wijten aan de toename van de remafstand. Bij zeer
nat wegdek (water op de baan) krijgt men meestal geen remspoortekening meer
en kan de remafstand sterk toenemen. Bij nat wegdek en niet te hevige
regenval (rekenend met een remvertraging van 5,5 m/s²) worden de rem- en
stopafstanden van een courante personenwagen in functie van de snelheid : TABEL2
De remafstand
van een motorfiets is in principe gelijk aan die van een auto. Maar het is
wel zo dat een motorfiets bij een noodremming en blokkering van het voorwiel,
waar (door het duikeffect) het leeuwenaandeel steekt van zijn remkracht,
instabiel wordt en valt. Meer daarover in hoofdstuk 3.3. Wanneer de
motorfiets schuift over de baan wordt zijn vertraging een stuk kleiner en
wordt zijn "remweg" dus langer.
Opmerkingen:
1. Wanneer
een auto (zonder ABS-remmen) remt onder uitwijking dan zal meestal de lengte
van het linker en rechter remspoor niet dezelfde zijn. Wanneer de wagen naar
links uitwijkt dan zal door die uitwijking (inertie) het rechter voorwiel
meer belast worden, terwijl het linker voorwiel wat ontlast wordt. Hoe minder
gewicht er op een wiel ligt hoe sneller het blokkeert bij een hevige
remming. En een wiel, dat blokkeert, tekent remspoor. Bij een
uitwijking naar links zal het remspoor van het linker voorwiel dus eerder
aanvangen dan het rechter. En vice versa. Maar
uiteraard geldt dat voor de berekening van de snelheid het langste remspoor
in acht te nemen is.
2. Er dient
uiteraard onderscheid gemaakt tussen remsporen en
driftsporen van een auto.
Remsporen
worden getekend wanneer de auto hevig afremt. Remsporen lopen rechtdoor of
bijna rechtdoor en hun onderlinge afstand bedraagt steeds de spoorbreedte van
de wagen. Zie bijvoorbeeld de foto onder hoofdstuk 3 §1. Remsporen van een
wagen met ABS-remmen kunnen wel sterker afbuigen maar zijn niet of nauwelijks
te zien. En als men wat ziet zijn het meestal maar opeenvolgende vegen
met enige tussenafstand (zie hoofdstuk 5 §6. )
Driftsporen
worden getekend wanneer de achterkant van een wagen uitbreekt ten gevolge van
bruuske stuurreacties. De achtertrein van de wagen
gaat dan uit het spoor van de voortrein lopen en de wagen schuift deels
zijdelings. De wielen, in de eerste plaats de wielen aan de lijzijde van de
schuivende wagen, tekenen dan driftsporen: zie bijvoorbeeld de foto's onder
hoofdstuk 5 §9 of onder het laatste hoofdstuk "voorbeelden, simulaties
en crashtesten" onder de punten 4 en 14. De onderlinge afstand
tussen driftsporen is niet meer gelijk aan de spoorbreedte van de wagen maar
is aan het begin erg klein (omdat ze getekend worden door een voor- en
achterwiel aan dezelfde kant van de wagen) en neemt toe naarmate de wagen
zich dwarser stelt over het traject van de driftbeweging. De vertraging van
de wagen over een driftspoor is gewoonlijk beduidend kleiner dan de
vertraging over een remspoor. Althans aan het begin van het driftspoor
is dat zo. Er blijkt zelfs dat de meeste bestuurders, die met hun
wagen in een driftbeweging verzeild raakten, in eerste instantie weinig of
niet afremmen. De reden is dat die bestuurders er kennelijk voor opteren te
proberen de wagen weer bij te sturen - wat meestal niet lukt - en wanneer men
hevig afremt kan men sowieso niet goed bijsturen. Maar men mag dus niet
over een driftspoor zomaar gaan rekenen met de remvertragingen uit
bovenstaande tabellen. Eénmaal de wagen compleet dwars staat loopt zijn
vertraging dan wel op tot die van een uitgesproken remming.
Wagens met ABS-remmen
tekenen even goed driftsporen als wagens met klassieke remmen. 2. Botsingssnelheid versus initiële snelheid. [Top]
Wanneer een remspoor
eindigt in een botsing op een andere personenwagen, vrachtwagen of hindernis,
dan kan men bovenstaande tabellen niet direct meer toepassen. Bijvoorbeeld, onderstel botsing van
een wagen aan 50 km/u, waaraan nog 25 m remspoor (op droog wegdek)
voorafgaat. Dan kan niet beweerd worden dat de initiële snelheid 120 km/u
bedroeg, nl. de som van 50 km/u en 70 km/u (de snelheid horend bij een
remspoor van 25m volgens tabel 1 hierboven). In dergelijk geval moet de
initiële snelheid berekend worden m.b.v. de formule: v
= √(v0² + 2 . a . s) [√ =
vierkantswortel] met v
= aanvankelijke snelheid in m/s In ons voorbeeld bedraagt de
aanvankelijke snelheid dus: √
(13,89² + 2 . 7,5 . 25) = 23,8 m/s = 85,8 km/u. Opmerkingen Het min of meer nauwkeurig berekenen
van botsingssnelheden (bij botsingen tussen personenwagens) gebeurt aan de
hand van gegevens, op te maken uit de uitlooptrajecten van de voertuigen nà botsing, en uit de schade. Daarover meer in hoofdstuk
2. Bij moderne
personenwagens, die echter nog geen ABS-remmen hebben, maken meestal slechts
de voorwielen remspoor (omdat er op de achteras een remkrachtbegrenzer
steekt, die verhindert dat de achterwielen blokkeren en dat de wagen met 4
geblokkeerde wielen alzo dwars zou beginnen schuiven). Soms ziet men dat een
wagen bij hevige remming alsnog ook remspoor tekent met zijn achterwielen.
Probeer dan steeds onderscheid te maken tussen de remsporen van voor- en
achterwielen. Teken op de ongevalsschets de remsporen, die doorlopen tot aan
de voorwielen, effectief tot aan de voorwielen (om onderscheid te maken met
de wagen, die na remming nog een paar meter uitbolt).
REMVERTRAGING
VAN VOERTUIGEN Voor een doorsnee personenwagen rekent
men gewoonlijk met volgende waarden voor de remvertraging bij hevige remming
(noodsituatie) op vlak wegdek:
echter
is het zo dat bij moderne personenwagens met ABS-remmen - en daarmee zijn thans
de meeste wagens uitgerust - de remvertraging bij hevige remming op droog
wegdek waarden bereikt boven de 8 m/s². Bijvoorbeeld hieronder de
versnelling- en remstestcurve opgenomen met
XL-meter (zie www.inventure.hu )van een
VW Golf 1,9 TDI, 85 KW, bj. 2000 op vochtig
asfaltwegdek. Die wagen bereikte in het tweede deel van de test een
gemiddelde remvertraging van 8,71 m/s². Bemerk tevens dat die wagen in eerste
versnelling een versnellingspiekwaarde haalt van 5 m/s². Klik op de
miniatuur voor volledig beeld.
op natte kassei met ABS : 5,5 à 6 m/s².
Hieronder de resultaten van remtesten op nat wegdek met een Audi A4, 2,5 TDI
(bj 98) met ABS-remmen op nat wegdek :
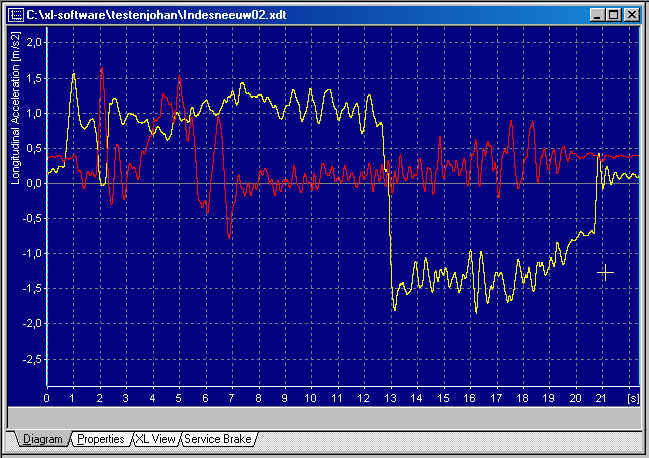
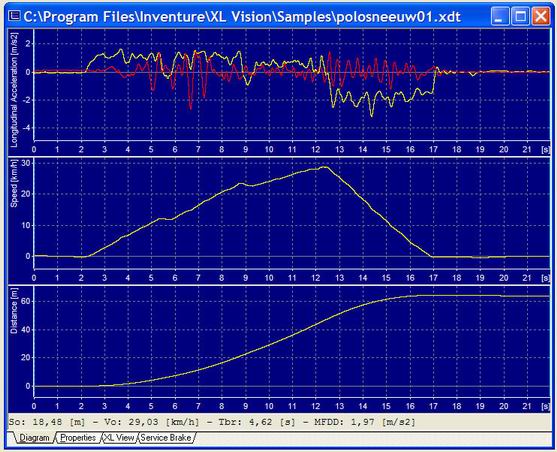
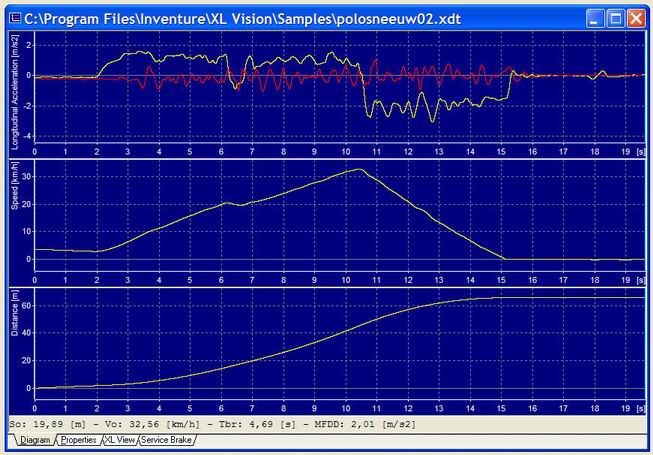
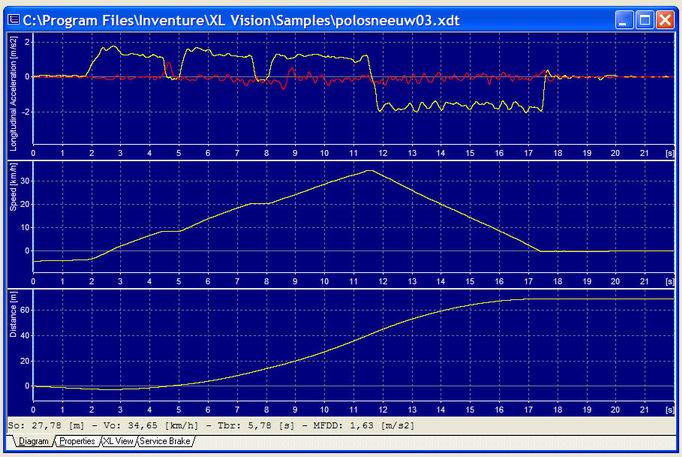
Remtesten op besneeuwd wegdek met een VW Polo 1.5 TDI, 55 kW, bouwjaar 2002,
met ABS remmen : resultaten 1,6 à 2 m/s² :
zie curves hieronder :
test 1 op besneeuwde kassei : gemiddelde vertraging : 1,97 m/s²
test 2 : op besneeuwde betonstenen : gemiddelde vertraging : 2,01 m/s²
test 3 : op besneewde asfalt : gemiddelde
vertraging: 1,63 m/s²
Vrachtwagens hebben bij eenzelfde
snelheid hogere remafstanden nodig dan personenwagens en hoe meer zij geladen
zijn, hoe hoger hun remafstand wordt (reden waarom hun snelheid, vanaf een
Maximum Toegelaten Massa (MTM) van 7,5 ton, op secundaire wegen beperkt wordt
tot 60 en 90 km/u). Op hellingen stijgt of daalt de
maximale remvertraging van een voertuig (a rato van ca 1 m/s² per 10%
helling). 3. Vermijdbaarheid van een ongeval [Top] "Vermijdbaarheid"
is een eerder technische term, die veel gebruikt wordt in de ongevallenanalyse
en die in feite uit de Duitse technische vakliteratuur afkomstig is. Men
vindt hem niet direct in een wetboek of in het verkeersreglement. Men vindt
hem ook niet in het woordenboek Van Daele. In de Duitse vakliteratuur
met betrekking tot ongevallenanalyse - en hier in Europa is die toonaangevend
- worden complete hoofdstukken gewijd aan de "Vermeidbarkeit"
van een verkeersongeval en wellicht heeft dat te maken met de formulering van
de grondregel van het Duitse Verkeersreglement (StVO
: Strassenverkehrs-Ordnung (zie bijvoorbeeld https://www.juris.de/purl/gesetze/_ges/StVO ), §1, die zegt : (1) Die Teilnahme am Straßenverkehr
erfordert ständige Vorsicht und gegenseitige Rücksicht. (2) Jeder Verkehrsteilnehmer hat sich
so zu verhalten, daß kein Anderer
geschädigt, gefährdet oder mehr, als nach den Umständen unvermeidbar,
behindert oder belästigt wird. De materie is
belangrijk omdat ze betrekking heeft op de technische verantwoordelijkheid
voor een ongeval. De studie van de “vermijdbaarheid” in
de ongevallenanalyse is in feite niets anders dan een studie, die nagaat of
er causaal verband is tussen fout en schade (ongeval). Het enige dat de rechtbank immers wil weten
van de deskundige, die het ongeval analyseert, is of er causaal verband is
tussen fout, meestal overschrijding van de snelheidslimiet, en schade. Om het causaal verband te toetsen
tussen fout en schade gebruikt de jurist dikwijls de “conditio sine qua
non”-test. In zulke test verandert men
alleen de te onderzoeken fout door wat men dan noemt “het hypothetisch
rechtmatig alternatief” (l’ alternative légitime). En men
gaat na of de schade er bij wegdenken van die fout in voor het overige
dezelfde omstandigheden ook zou geweest zijn.
Wanneer de schade er niet of minder zou geweest zijn, wanneer die ene
onderzochte fout wordt weg gedacht en vervangen door dat hypothetische
rechtmatig alternatief, dan is er causaal verband. Daarbij is voor ogen
te houden dat “sine qua non” eigenlijk impliceert dat men opzoek gaat naar
wat absoluut noodzakelijk is, waarbij minder niet mag om de test te laten
lukken en waarbij meer niet meer mag aanzien worden als nog de juiste
toepassing. Voorbeeld uit de praktijk : zwaar beschonken autobestuurder komt op een
kruispunt uit een voorrangsplichtige zijstraat
afremmend de hoofdweg opgereden, klaarblijkelijk omdat hij te laat reageerde
op de aanwezigheid van de haaientanden; de hoek met de hoofdweg is
onoverzichtelijk; hij wordt op de hoofdweg in de flank gevat door een
vrachtwagen, die 70 km/u rijdt en die 150m eerder op de hoofdweg een F1 bord
“bebouwde kom” gepasseerd was. De parketdeskundige besluit dat, zou de
vrachtwagen 150m eerder zijn snelheid gemilderd hebben tot 50 km/u, er geen
ongeval zou geweest zijn omdat de auto dan al over de hoofdweg zou geraakt
zijn toen de vrachtwagen daar aankwam en concludeert dat het ongeval
vermijdbaar was in hoofde van de vrachtwagenbestuurder. Wanneer men inderdaad
de CSQN-test uitvoert zal men vinden dat, zou de vrachtwagenbestuurder ter
hoogte van het F1 bord zijn snelheid gemilderd hebben tot 50 km/u, hij wat
later op de plaats van ongeval zou aangekomen zijn en er aldus geen ongeval
zou geweest zijn. Men voelt wel aan dat die redenering mank loopt, want op
150m was de auto voor de vrachtwagenbestuurder zelfs nog niet waarneembaar,
gezien de onoverzichtelijke hoek. En
stel u voor dat het F1-bord 500m eerder stond. De werkelijkheid is dat een
snelheid van 70 km/u 150m eerder nog niet noodzakelijk tot het ongeval moet
leiden; tussenin kan de vrachtwagen bijvoorbeeld nog in panne vallen. In feite is de studie van de
“vermijdbaarheid” in de ongevallenanalyse dus niks anders dan een technische
studie naar een causaal verband door een CSQN-test. De CSQN-test met vervanging door het
legitiem alternatief test weliswaar de nodige voorwaarde maar bij toepassing
van die test moet men dus wel in gedachten houden dat de bedoeling is finaal
uit te komen bij wat nog juist en minimaal nodig is; want al wat men aan fout
test boven wat minimaal nodig is, is uit principe niet meer noodzakelijk om
een ongeval te hebben. Wanneer men op 500m vóór de plaats van
botsing over bijvoorbeeld 100m te snel rijdt, dan zal een CSQN-test,
toegepast over die 100m, uiteraard ook als resultaat opleveren dat er dan
geen ongeval zou zijn geweest (omdat de bestuurder dan later op de plaats van
ongeval zou zijn gearriveerd) maar de fout over die 100m staat niet in
causaal verband met het ongeval omdat ze niet noodzakelijk is om tot het
ongeval te komen; immers wanneer men dan de volgende 100m extra traag zou
rijden of zelfs zou stoppen, zou er ook geen ongeval zijn. Te snel rijden op
500m vóór de plaats van ongeval leidt niet noodzakelijk tot het
ongeval. En dan kan men de zaken bekijken
vanuit de twee kanten (ingeval van twee betrokkenen): a)
van uit de kant van de prioritaire bestuurder, die de snelheidslimiet
overschreed : Stel dat men dus in de ongevalsanalyse
vindt dat de prioritaire bestuurder aan overdreven snelheid de ongevalsscène
binnen reed. Men moet dus nagaan in de CSQN-test of
de prioritaire bestuurder aan de wettelijke snelheid ook nog zou gebotst
hebben. Heel de vraag is dan vanaf waar men de
prioritaire bestuurder aan de wettelijk toegelaten snelheid moet laten rijden
naar de plaats van ongeval toe, want dat heeft een beduidende invloed op het
resultaat van de CSQN-test. Er is dus het criterium dat de fout
moet noodzakelijk zijn. En daarmee komt men dan in feite binnen “remafstand”
van de plaats van botsing. In de vakliteratuur over
ongevallenanalyse gaat men er van uit dat, voor wat de prioritaire bestuurder
betreft, men hem in de CSQN-test zet op de plaats waar hij was op het moment
waarop hij moest opgeschrikt worden en reageren ten opzichte van de debiteur
van prioriteit, m.a.w. vanaf het moment dat duidelijk wordt dat die een
hindernis wordt. En vanaf daar heeft men dan twee
mogelijkheden, nl. de vermijdbaarheid in ruimte (afstand) waarbij de
prioritaire bestuurder aan de wettelijke snelheid nog zou kunnen stoppen
hebben vóór het dwarstraject van de hindernis, en de vermijdbaarheid in tijd,
waarbij de prioritaire bestuurder niet meer kan tot stilstand komen vóór het
dwarstraject van de andere maar waarbij de andere nog tijdig uit de baan
geraakt van de prioritaire bestuurder omdat die vanaf de wettelijke snelheid
wat meer tijd nodig heeft om tot daar te geraken. Daarbij is het dan
wel zo dat de vermijdbaarheid in tijd minder zwaar weegt dan die in ruimte
omdat bij een vermijdbaarheid in tijd, de prioritaire bestuurder niet meer
zelf alle troeven in handen heeft: hij is immers ook nog afhankelijk van de
dwarssnelheid van de voorrangsplichtige
bestuurder. b) Daarnaast kan men dan gaan kijken naar de vermijdbaarheid in hoofde
van de debiteur van prioriteit: in principe staat zijn fout vast want hij
is debiteur van prioriteit; het enige dat hem wel nog kan helpen is de
kwestie in hoeverre hij niet verschalkt werd in zijn normale verwachtingen
(was de andere “voorzienbaar”?). En dan moet men nagaan op welke
afstand de prioritaire bestuurder was op moment dat de debiteur besliste te
starten van uit de zijstraat. En in principe geldt m.i. ook daar de “reactieseconde”
of “beslissingsseconde”. En dan moet men nagaan of de prioritaire
bestuurder van op die afstand waarneembaar was en of zijn te hoge snelheid
leesbaar was. Dan moet men bijvoorbeeld nagaan of de voorrangsplichtige
bestuurder zijn maneuver al had kunnen beëindigen, indien de prioritaire
bestuurder aan ongeveer de wettelijke snelheid had gereden. Op die manier kan er wel causaal
verband ontstaan tussen de fout van de te snel rijdende bestuurder op nog
grotere afstand van de ongevalsplaats en het ongeval. Dan kan men
bijvoorbeeld redeneren dat de bestuurder, die links afslaat naar een oprit in
bebouwde kom, een bepaald verwachtingspatroon heeft over de afstand waarop
tegenliggers, die in bebouwde kom nog een risico kunnen vormen, zich bevinden en maar goed kijkt of in dit
kleinere “bebouwde-kom-risicoveld” tegenliggers aanwezig zijn en geen acht meer slaat op verkeer op grotere
afstand; hij ziet er geen; de snel rijdende tegenligger is op dat moment
inderdaad nog op grotere afstand, weze het in
principe zichtbaar in de verte. Maar dan is de fout, overdreven snel rijden
op grotere afstand, vanwege de tegenligger wel minimaal noodzakelijk om zich
nog buiten het “bebouwde-kom-kijkveld” van de bestuurder te bevinden, die op
het punt staat links af te slaan. Bij dit alles is het
uiteraard zo dat de reconstructie van een “rechtmatig alternatief” in de
CSQN-test principieel een juridische kwestie is, waarin de rechter het
laatste woord heeft. De deskundige kan alleen maar meedelen wat hij als
“rechtmatig alternatief” aannam in zijn vermijdbaarheidsstudie, dan wel wat
hij daarbij vanuit technisch oogpunt redelijk vond. Het zelfde geldt
uiteraard voor de beoordeling van het resultaat van de test; ook dat is en
blijft vanzelfsprekend juridische materie. De problematiek rond het vermijden van ongevallen wordt in het Belgische verkeersreglement aangeraakt in artikel 10.3 , dat handelt over de snelheid en dat stelt dat een bestuurder in alle omstandigheden moet kunnen stoppen voor een hindernis, die kan worden voorzien. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Van technische kant bekeken biedt de formulering van art. 10.3
enerzijds veel ruimte, maar anderzijds kan misschien toch gezegd worden dat
voor sommige aspecten van een risicosituatie in het verkeer geen leidraad
verschaft wordt. [Het Duitse verkeersreglement gaat daarin met betrekking tot
snelheid een stuk verder. Ook het nieuwe Franse verkeersreglement gaat daarin
nu een stuk verder : zie bijvoorbeeld: ] http://www.legifrance.gouv.fr , les
codes, code de la route, partie réglementaire,
R413-17) Want opzij van de ruimte, die het Belgische artikel 10.3 laat
bestaan met betrekking tot een criterium om een hindernis al dan niet
voorzienbaar te noemen, wekt dit artikel dan enigszins de indruk dat er voor
een onvoorzienbare hindernis niets kan of hoeft ondernomen worden of dat in
zo een geval de gevoerde snelheid minder of niet meer van tel is. Waarschijnlijk bedoelde de wetgever met een “voorzienbare
hindernis” een hindernis of misschien een dreigende hindernis, die van op een
dergelijke afstand waarneembaar is, dat een normaal en attent bestuurder zijn
snelheid kan aanpassen en desnoods nog tot stilstand kan remmen. Alleszins
technisch is dat een voor de hand liggende definitie. Maar de
“voorzienbaarheid” van de hindernis wordt daarmee in feite veel meer een
kenmerk van die afstand dan een kenmerk van de hindernis zelf. Een
kind, dat de rijbaan oploopt of nog maar aanstalten maakt om de rijbaan op te
lopen, vormt voor een wagenbestuurder, die zich nog op 100 meter
bevindt, ongetwijfeld een “voorzienbare” hindernis. Anders is het
wanneer die wagen zich op 20 meter bevindt. En toch moet het redelijkerwijs zo zijn dat, zelfs wanneer die
wagen zich op 20 meter bevindt, alsnog van die bestuurder verwacht wordt dat
hij alles in het werk stelt om het ongeval te vermijden of, zo dat onmogelijk
is, dat hij alles in het werk stelt om de gevolgen ervan te beperken. Dat
vindt men nu weinig of niet meer terug in art. 10.3. De ongevallendeskundige ziet het dan eerder zo dat de
autobestuurder, geconfronteerd met een waarneembare hindernis op zijn weg of
geconfronteerd met een weggebruiker, die aanstalten maakt in zijn baan
terecht te komen, alles in het werk zal stellen om een aanrijding te
vermijden. En in de eerste plaats zal dat remmen zijn en desnoods ook
uitwijken. En het is niet onnuttig ook "defensief rijgedrag" daarin
te betrekken. Daarom
heeft de technieker het in de ongevallenanalyse gaarne over de
“vermijdbaarheid” van een ongeval. Hij gaat na op welke afstand de
betrokken bestuurder zich bevond toen de hindernis zich opwierp als
hindernis, bijvoorbeeld toen het kind de rijbaan begon op te lopen. Hij
gaat na of de bestuurder aan die afstand al dan niet voldoende had om mits
een attente reactie tot stilstand te remmen. Hij gaat verder na hoe snel de
betrokken bestuurder daar reed. En, indien de betrokken bestuurder daar, op
de plaats waar hij was toen de hindernis waarneembaar en herkenbaar werd, de
plaatselijke snelheidslimiet overschreed of een onvoorzichtige snelheid
voerde of abnormaal laat reageerde, dan gaat de deskundige na wat daar de
consequenties van waren en of dat een rol speelde in het ontstaan dan wel in
de gevolgen van het ongeval. Onder
Hoofdstuk 4, §5, van deze nota in het kader van de behandeling van het
voetgangersongeval, wordt wat meer in detail een voorbeeld van de
redeneringswijze in zulke vermijdbaarheidsanalyse gegeven. Wij besteden er ook
aandacht aan de veel gemaakte redeneringsfout bij beoordeling of analyse van
de vermijdbaarheid van een ongeval, die erin bestaat in de tijd te gaan
redeneren. Het is inderdaad niet omdat de automobilist, die 90
km/u reed in bebouwde kom, maar één seconde tijd had om de plots dwarsende
hindernis waar te nemen en te herkennen, dat het ongeval aan 50 km/u sowieso
ook onvermijdbaar zou geweest zijn in hoofde van die automobilist. Met in het
achterhoofd dan de gedachte dat zijn reactietijd al één seconde bedraagt en
hij dus geen tijd meer kon hebben om effectief te remmen. Het onderzoek naar de vermijdbaarheid in een technische
ongevallenanalyse sluit dus in feite dicht aan bij de algemene benadering van
het onderzoek naar de technische aansprakelijkheid in eender welk
schadegeval. Daar wordt onderzocht wie er allemaal fouten maakte
en wat het aandeel of gewicht was van elk van die fouten in het ontstaan van
het schadegeval en in de omvang ervan. Het is evident dat in veel
verkeersongevallen als fout de schending van prioriteit opduikt. Maar
het is even goed mogelijk dat ook de prioritaire weggebruiker een fout
maakte, nl. te snel rijden of onoplettend rijden (of beide samen). En die
zaken worden in een vermijdbaarheidsanalyse onder de loep genomen. 4. Stopafstanden
van vrachtwagens - roodlichtcamera's.
[Top] De vraag stelt zich naar een berekening, die toelaat iets te
zeggen nopens het argument, gehanteerd door vrachtwagenbestuurders, geflitst
aan verkeerslichten, dat het wegens de lengte van hun vrachtwagen is dat zij
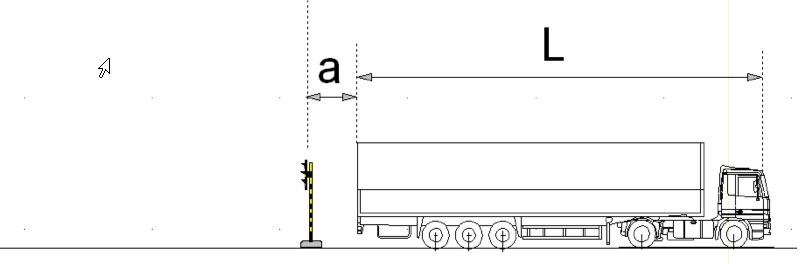
bij oranje niet tijdig meer kunnen passeren zonder geflist
te worden. t : het aantal seconden na begin rood, waarop geflitst werd. De situatie kan dan als volgt voorgesteld worden. Stel dat de achterkant van de vrachtwagen zich op 2m voorbij
het verkeerslicht bevond op moment dat hij geflitst werd. Aldus a = 2m. Terug kerend naar het voorbeeld blijkt uit bovenstaande tabel
dat een vrachtwagen aan 50 km/u op ruim minder dan 56,4m kan stoppen - zie
tabel hierboven - en dat het argument van de vrachtwagenbestuurder, geflitst
op 2,5s nà begin rood, dat de lengte van zijn sleep
hem parten speelt, dus niet kan weerhouden worden.
|